|
|
|
|
Maximum use of bicycle parts makes routine repair of the robot possible wherever you can get a bike fixed. We believe that epoxy-potting of the electronics and armouring the motors in conjunction with a break-away design should enable them to be reused after inadvertently triggering a mine. The batteries and the rest of the structure would be expended by a detonation. Since only one of these robots exists at present, we are hesitant to confirm this by experiment.
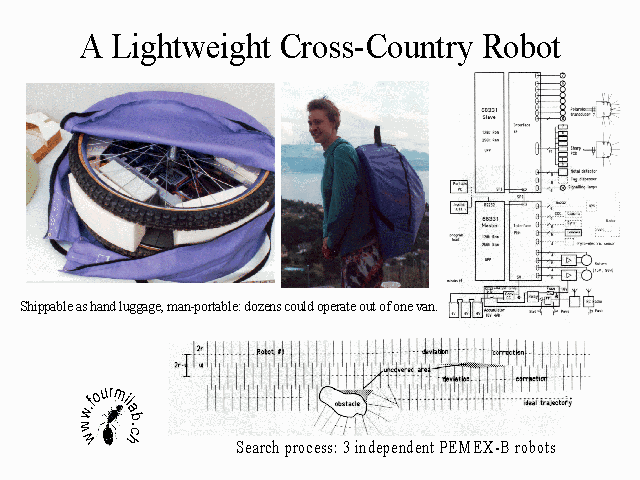
The robot can be quickly disassembled and the wheels mounted on the sides of the chassis for transport. One person can carry the robot with all its support components in a specially-design rucksack, and it can be carried as hand luggage on airline flights. It is small and light enough so that, sensors and navigation permitting, a single van could transport and deploy one to two dozen robots in a mine field, with independent robots surveying the field, marking likely detections, and returning to the van to recharge as necessary.
There are lots of different approaches to robotics for mine clearance, and it is likely that many of them will work. The robots await solutions to the sensor problem, at which point they may be able to contribute to the larger task.